Ejemplo de transformación euclídea: el sólido ABC ha cambiado de posición, pero las distancias euclídeas entre sus vértices en la nueva posición (A'B'C') siguen siendo las mismas
Una transformación euclídea (también denominada euclidiana), llamada así en memoria del matemático griego Euclides, es una aplicación del espacio euclídeo sobre sí mismo que preserva las distancias y, por lo tanto, los ángulos. En la transformación euclídea real también se conserva la orientación, excluyéndose así las reflexiones.
En la mecánica clásica, una transformación euclídea real afecta al observador, e implica una traslación y rotación del sistema de referencia del propio observador. Se consideran únicamente las transformaciones reales, porque en la mecánica no se producen reflexiones de los cuerpos materiales, ya que la mecánica solo considera las leyes físicas en el mundo macroscópico determinado por la gravedad.[1] La transformación del observador euclídeo puede imaginarse como el movimiento de un sistema de referencia como si fuese un cuerpo rígido en el que el origen y los ejes de coordenadas adjuntos se pueden mover arbitrariamente, pero de manera que los ejes de coordenadas conservan su orientación y ángulos relativos entre sí y no se estiran ni se comprimen. La transformación de Galileo en el espacio euclídeo es un caso especial de transformación euclídea, en el que se produce un movimiento lineal uniforme con velocidad relativa constante.[2]
En mecánica, las transformaciones euclídeas se utilizan para definir cantidades objetivas o invariantes que son percibidas de la misma manera por observadores en sistemas de referencia con diferentes movimientos (véase sistema de referencia). Las magnitudes objetivas que describen el estado de un cuerpo material son de importancia central en la mecánica de medios continuos, que no está de acuerdo con la condición de que un observador en movimiento mida un comportamiento material diferente al de uno estacionario. Esta ley se llama principio de objetividad material.
Descripción general
La representación habitual es en tres dimensiones, pero puede generalizarse fácilmente a n dimensiones. La transformación euclídea preserva la distancia de un espacio euclídeo relacionado consigo mismo. Dado que contiene una función de distancia, el espacio euclídeo es un espacio métrico y la transformación euclídea es una isometría. Respecto a su ejecución secuencial, las transformaciones euclídeas forman un grupo.
Dependiendo del tipo de espacio euclídeo que se utilice, hay diferentes formulaciones disponibles:
La transformación del espacio euclídeo de puntos es un movimiento, que también se denomina como «propio» si se conserva la orientación, e «impropio» si no es así.
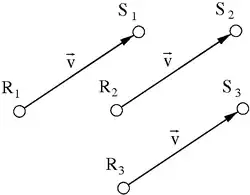
que aplica a todos los elementos un desplazamiento paralelo de la misma longitud, dirección y sentido desde cada punto a cada punto . Este desplazamiento queda representado por un vector (véase la figura). La importancia de esto queda clara en la interpretación activa del cambio del observador.[3]
Interpretación pasiva o transformación de coordenadas
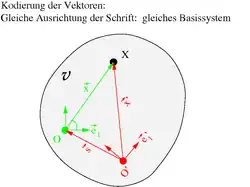
Ilustración de la transformación de coordenadas (la misma orientación del texto implica la misma base)
Seleccionando cuatro puntos que no estén en un plano, de los cuales O representa el origen, se diseña una base de . Para simplificar, los vectores deben ser perpendiculares entre sí en par a par y cada uno tener longitud uno, de modo que los vectores base representen una base ortonormal. A cada punto ahora se le pueden asignar coordenadas :
con los componentes
Ahora se realiza un cambio del sistema de referencia seleccionando otros cuatro puntos , lo que conduce a la nueva base ortonormal (véase la figura). El punto recibe coordenadas diferentes en el nuevo sistema de referencia:
Con
los resultados de la ecuación vectorial son
La relación entre las coordenadas se describe mediante la transformación de coordenadas
Esta es una ecuación matricial tal como se describe en un sistema de coordenadas o en una isometría. La matriz de dimensión 3 × 3 Q con las componentes es una matriz ortogonal, y por lo tanto
donde E representa la matriz identidad. Si el determinante det(Q) = +1, los vectores de las bases y poseen la misma orientación relativa, y se produce una verdadera transformación euclídea.
Interpretación activa o aplicación sin coordenadas
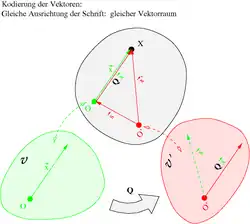
Ilustración de la interpretación activa de la transformación euclídea (la misma orientación del texto implica la misma base)
Un observador generalmente elegirá un origen diferente y una aplicación diferente con respecto al espacio de puntos euclídeo, que otro observador. Las imágenes de y se pueden como máximo rotar, porque la aplicación debe preservar la longitud y una traslación no es importante aquí, ya que a todas las traslaciones paralelas, codireccionales y de la misma longitud desde los puntos a los puntos se les asigna el mismo vector:
donde Q es un tensor ortogonal (QT · Q = 1, representado el símbolo 1 un tensor unitario) (véase la figura). Entonces,
Esta ecuación vectorial no tiene coordenadas, es decir, no se refiere a ningún sistema de coordenadas o base. A diferencia de la interpretación pasiva, aquí se aprovecha la capacidad de los tensores (aquí Q) de establecer aplicaciones sobre los vectores de un espacio vectorial, el espacio imagen de , a otro, el espacio imagen de , donde en este caso los dos espacios imagen son idénticos. Si det(Q) = +1, hay nuevamente una verdadera transformación euclídea. Como cada tensor es una función lineal, este procedimiento corresponde a descripción mediante asignaciones lineales.
La aparente contradicción de que , se resuelve cuando se tienen en cuenta los diferentes sistemas base a la izquierda y a la derecha del signo igual:
donde Q es la representación componente por componente
con Qij como en la interpretación pasiva, lo que subraya la equivalencia de las interpretaciones pasivas y activas.
Transformación del tiempo
Un cambio de observador también implica un cambio en la escala de tiempo. En las transformaciones euclídeas solo se considera un desplazamiento constante Δt:
lo que significa que los observadores leen diferentes valores en sus relojes al mismo tiempo, pero la diferencia entre los valores es siempre la misma. Por lo tanto, los observadores pusieron en marcha sus cronógrafos en diferentes momentos.
Observador general del cambio
En la mecánica clásica, un cambio de observador se puede describir de la siguiente manera:
porque las reflexiones rotacionales (con det(Q) = -1) no son posibles en el mundo macroscópico, dominado por la gravedad y el electromagnetismo.
donde denota un desplazamiento constante, una velocidad constante y Q0 una rotación constante. Esta combinación de aplicaciones deja la magnitud y el ángulo relativo de las aceleraciones sin cambios.
Magnitudes objetivas o invariantes
Las cantidades que se perciben sin cambios cuando cambia el sistema de referencia se denominan objetivas o invariantes. Para empezar, considérese la distancia entre dos puntos: en cualquier transformación euclídea, la distancia entre dos puntos cualesquiera siempre permanece constante y esto también se aplica al cambio general de observador. Sean y los vectores de posición de dos puntos P y Q. El cuadrado de su distancia
permanece sin cambios si QT · Q = 1 y el vector de distancia transformado cumple que
Esto último caracteriza a los vectores objetivos. La propiedad de transformación de los tensores objetivos se deriva del requisito de que un tensor objetivo asigne vectores objetivos a vectores objetivos. Para los vectores objetivos y , también debe ser objetivo. , y dan como resultado:
Para que esto sea válido para todos los vectores objetivos y , el tensor debe cumplir la relación de transformación
Propiedades de transformación de las cantidades objetivas
Una cantidad es objetiva si se transforma de la siguiente manera cuando cambia el observador:
No es una cantidad objetiva, y lo mismo ocurre con la aceleración:
Solo en el caso especial de la transformación galileana la objetividad de la aceleración es debida a que y . Sin embargo, se puede demostrar que la velocidad absoluta y la aceleración absoluta son objetivas.
La derivada respecto al tiempo de un vector objetivo
en general no es objetiva, y lo mismo se aplica a la derivada respecto al tiempo de un tensor objetivo :
Para la formulación de las ecuaciones constitutivas dependientes de la velocidad se requieren derivadas respecto al tiempo objetivas para las variables constitutivas del enfoque Euleriano, porque no está de acuerdo con la experiencia de que un observador en movimiento mida un comportamiento material diferente al de uno estacionario. Por lo tanto, los modelos materiales deben formularse con derivadas respecto al tiempo objetivas. La teoría de la deformación finitaF describe las deformaciones locales en un punto del material y, en consecuencia, también contiene toda la información sobre las tasas de deformación. El gradiente de velocidad espacial
cuya parte simétrica d = ½( l + lT) se llama tensor de velocidad de deformación espacial, y cuya parte asimétrica w = ½( l – lT) se llama tensor de vórtice o tensor de espín. Estos tensores se escriben aquí en minúsculas porque son formulados espacialmente. En la teoría de materiales, las tasas objetivas del tensor de deformaciones y del tensor de tensiones son de particular interés. Se han definido varias tasas de deformación, entre ellas[4]:
La velocidad de la tensión de Zaremba-Jaumann indica el cambio temporal de las tensiones en el sistema de referencia móvil. Un observador que gira con el elemento material observa el cambio temporal de las tensiones .[7]
Para un vector objetivo las derivadas temporales son
La siguiente lista proporciona una selección de dimensiones objetivas.
Escalar
Geometría: Distancia, Área (cantidad), Volumen (cantidad). El volumen solo es objetivo para transformaciones euclídeas propias, con det(Q) = +1.
Física: La temperatura, la masa, la energía interna y la entropía son escalares objetivos. De aquí se deduce que las magnitudes específicas relacionadas con la masa o el volumen también son objetivas: densidad, energía interna específica y entropía específica.
Vectores
Geometría: vector de distancia y el tensor métrico. La integral de superficie solo es objetiva para transformaciones euclídeas propias, en las que det(Q) = +1.
Cinemática: velocidad absoluta, aceleración absoluta e invariantes vectoriales.
Física: fuerza, vector de tensión, vector de flujo de calor y gradiente de temperatura.
Tensores
Las propiedades de transformación anteriores para tensores se aplican a los llamados tensores espaciales de un campo, cuyo dominio y rango de valores giran con el movimiento. Además, en la mecánica del continuo existen tensores de un solo campo "relacionados con el cuerpo" cuya definición y dominio de valores está determinado materialmente por la configuración de referencia, que es independiente del movimiento y, por lo tanto, es la misma para todos los observadores. Los vectores de imagen de estas configuraciones están, para decirlo simplemente,unidos a un punto material como una etiqueta, legible por todos los observadores. Los tensores objetivos relacionados con el cuerpo se transforman según la relación
.
Además, la mecánica del continuo conoce tensores de dos campos que transforman vectores y tensores entre dos configuraciones. Un ejemplo de esto es el primer tensor de tensión de Piola-Kirchhoff, que en coordenadas convectivas tiene la forma
Aquí, son vectores base en la configuración de referencia del material independiente del movimiento, son vectores base en la configuración instantánea espacial en movimiento y son las componentes del tensor. Ahora bien, si los vectores base son los mismos para todos los observadores, es decir, se aplica
y los vectores base son objetivos, es decir, de acuerdo con la transformación
entonces dicho tensor de dos campos es objetivo si se transforma de acuerdo con
es decir, se transforma como un vector objetivo.[8]
Los siguientes tensores se utilizan en mecánica, especialmente en mecánica del medio continuo. Dado que en mecánica no se consideran las transformaciones especulares de los cuerpos materiales, se supone que det(Q) = +1.
Derivada de Oldroyd de la deformación de Euler-Almansi
x
Transformaciones de sistemas de referencia en otras disciplinas físicas
La mecánica clásica y la electrodinámica son invariantes respecto a las reflexiones, porque las leyes en estas dos disciplinas están completamente determinadas por la gravedad y la interacción electromagnética. Sin embargo, esta simetría con respecto a las reflexiones se rompe en la mecánica cuántica por la violación de la paridad de la interacción débil. Las demás fuerzas de la naturaleza, especialmente la gravedad y el electromagnetismo, son interacciones que preservan la paridad.
En la teoría de la relatividad, se utilizan transformaciones entre sistemas de referencia móviles que dejan invariantes las magnitudes y los ángulos relativos de todos los vectores. La transformación entre sistemas de referencia móviles en el espacio-tiempo de cuatro dimensiones, que también deja invariantes las magnitudes y los ángulos de las (cuatro)velocidades y los momentos, son las de Lorentz-Boost. La diferencia con las rotaciones en el espacio euclídeo de cuatro dimensiones es que a la coordenada de tiempo de un cuadrivector en el espacio-tiempo de Minkowski se le asigna un signo diferente al de las coordenadas espaciales. Esto significa que en una matriz de rotación para rotaciones de coordenadas de tiempo y espacio, las funciones seno y coseno debe ser reemplazada por las correspondientes funciones hiperbólicas. El grupo euclídeo que contiene esta generalización se llama grupo de Poincaré.
Ejemplo
Se da la demostración de la objetividad de la tasa de Zaremba-Jaumann de un tensor objetivo. Para ello, se tiene que
↑Los cambios de observador "activo" y "pasivo" no deben confundirse con el movimiento activo, en el que un objeto se mueve, y el movimiento pasivo, en el que el observador se mueve con respecto al objeto estacionario.
↑Los signos de fórmula para las tasas objetivas varían de una fuente a otra. Las dadas en P. Haupt, S. 48ff. In H. Altenbach son
para y para usados.
↑Esta derivada aparece en la elasticidad de Cauchy y también recibe su nombre en honor a C. Truesdell. Él mismo nombró la derivada en honor a Cauchy y escribió en 1963 que esta tasa recibió su nombre sin ninguna buena razón (“llegó a recibir su nombre, sin ninguna buena razón, en honor a […] mí”). C. Truesdell: Remarks on Hypo-Elasticity. In: Journal of Research of the National Bureau of Standards - B. Mathematics and Mathematical Physics, Vol. 67B, No. 3, July-September 1963, S. 141.
Holm Altenbach (2012). Springer Vieweg, ed. Kontinuumsmechanik. Einführung in die materialunabhängigen und materialabhängigen Gleichungen (2. edición). Berlín u. a. ISBN 978-3-642-24118-5.
P. Haupt (2000). Springer, ed. Continuum Mechanics and Theory of Materials (La edición de 2010 tiene ISBN 978-3-642-07718-0 edición). ISBN 3-540-66114-X.
Horst Parisch (2003). Teubner, ed. Festkörper-Kontinuumsmechanik. Von den Grundgleichungen zur Lösung mit Finiten Elementen. Stuttgart u. a. ISBN 3-519-00434-8.











































![{\displaystyle {\begin{aligned}d'^{2}=&({\vec {p}}'-{\vec {q}}')\cdot ({\vec {p}}'-{\vec {q}}')=({\vec {s}}+\mathbf {Q} \cdot {\vec {p}}-{\vec {s}}-\mathbf {Q} \cdot {\vec {q}})\cdot ({\vec {s}}+\mathbf {Q} \cdot {\vec {p}}-{\vec {s}}-\mathbf {Q} \cdot {\vec {q}})\\=&[\mathbf {Q} \cdot ({\vec {p}}-{\vec {q}})]\cdot [\mathbf {Q} \cdot ({\vec {p}}-{\vec {q}})]=({\vec {p}}-{\vec {q}})\cdot \mathbf {Q^{\top }\cdot Q} \cdot ({\vec {p}}-{\vec {q}})\\=&({\vec {p}}-{\vec {q}})\cdot ({\vec {p}}-{\vec {q}})={d}^{2}\end{aligned}}}](./a242d56f1482e593def1e9c1b6b1358fdfc3bc36.svg)
































































 Datos: Q7333813
Datos: Q7333813