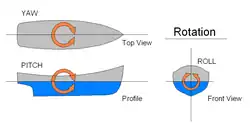
Guiñada (rotación)


Una rotación de guiñada es un movimiento alrededor del eje de guiñada de un cuerpo rígido que cambia la dirección a la que apunta, hacia la izquierda o hacia la derecha de su dirección de movimiento. La «velocidad de guiñada» o «velocidad de giro» de un coche, una aeronave, un proyectil u otro cuerpo rígido es la velocidad angular de esta rotación, o la tasa de cambio del ángulo de rumbo cuando la aeronave está en posición horizontal. Se mide comúnmente en grados por segundo o radianes por segundo.
Otro concepto importante es el momento de guiñada, o momento de guiñada, que es la componente de un par sobre el eje de guiñada.
Medición
La velocidad de guiñada se puede medir midiendo la velocidad respecto al suelo en dos puntos geométricamente separados del cuerpo, o mediante un giroscopio, o se puede sintetizar a partir de acelerómetros y dispositivos similares. Es la medida principal de cómo los conductores perciben visualmente el giro de un coche.
Es importante en los vehículos con estabilización electrónica. La velocidad de guiñada está directamente relacionada con la aceleración lateral del vehículo que gira a velocidad constante alrededor de un radio constante, mediante la relación
- velocidad tangencial*velocidad de guiñada = aceleración lateral = velocidad tangencial^2/radio de giro, en unidades adecuadas
La convención de signos puede establecerse prestando especial atención a los sistemas de coordenadas.
En una maniobra más general, en la que el radio varía y/o la velocidad varía, la relación anterior ya no se cumple.
Control de la velocidad de guiñada
La velocidad de guiñada se puede medir con acelerómetros en el eje vertical. Cualquier dispositivo destinado a medir la velocidad de guiñada se denomina sensor de velocidad de guiñada.
Vehículos de carretera
El estudio de la estabilidad de un vehículo de carretera requiere una aproximación razonable a las ecuaciones del movimiento.
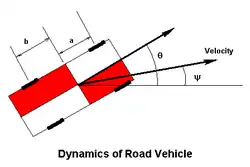
El diagrama ilustra un vehículo de cuatro ruedas, en el que el eje delantero se encuentra a a metros por delante del centro de gravedad y el eje trasero a b metros por detrás del centro de gravedad. La carrocería del coche apunta en una dirección (theta) mientras se desplaza en una dirección (psi). En general, estas no son la misma. Los neumáticos se desgastan en la zona de contacto en la dirección de la marcha, pero los cubos están alineados con la carrocería del vehículo, con la dirección centrada. Los neumáticos se deforman al girar para adaptarse a esta desalineación y, como consecuencia, generan fuerzas laterales.


A partir del estudio de la estabilidad direccional, denotando la velocidad angular , las ecuaciones de movimiento son:



con la masa del vehículo, la velocidad del vehículo y el ángulo total del vehículo.



El coeficiente de se denominará «amortiguación» por analogía con un amortiguador de masa-resorte que tiene una ecuación de movimiento similar. Por la misma analogía, el coeficiente de se denominará «rigidez», ya que su función es devolver el sistema a la deflexión cero, al igual que un resorte.



Por encima de esta velocidad, el vehículo será direccionalmente (derrape) inestable. Las correcciones para el efecto relativo de los neumáticos delanteros y traseros y las fuerzas de dirección están disponibles en el artículo principal.
La forma de la solución depende únicamente de los signos de los términos de amortiguación y rigidez. Los cuatro tipos de soluciones posibles se presentan en la figura.
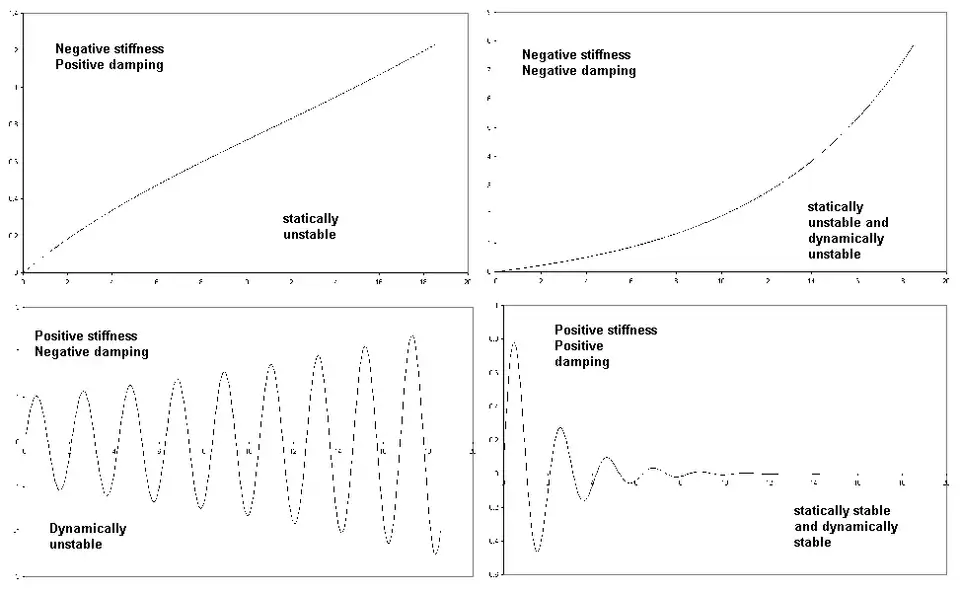 La única solución satisfactoria requiere que tanto la rigidez como la amortiguación sean positivas. Si el centro de gravedad se encuentra delante del centro de la distancia entre ejes , siempre será positivo y el vehículo será estable a cualquier velocidad. Sin embargo, si se encuentra más atrás, el término puede volverse negativo por encima de una velocidad dada por:
La única solución satisfactoria requiere que tanto la rigidez como la amortiguación sean positivas. Si el centro de gravedad se encuentra delante del centro de la distancia entre ejes , siempre será positivo y el vehículo será estable a cualquier velocidad. Sin embargo, si se encuentra más atrás, el término puede volverse negativo por encima de una velocidad dada por:

Por encima de esta velocidad, el vehículo será direccionalmente (derrape) inestable. Las correcciones para el efecto relativo de los neumáticos delanteros y traseros y las fuerzas de dirección están disponibles en el artículo principal.
Relación con otros sistemas de rotación
Estas rotaciones son rotaciones intrínsecas y el cálculo que las sustenta es similar al de las fórmulas de Frenet-Serret. Realizar una rotación en un marco de referencia intrínseco equivale a multiplicar por la derecha su matriz característica (la matriz que tiene el vector del marco de referencia como columnas) por la matriz de la rotación.
Historia
El primer avión que demostró un control activo en los tres ejes fue el planeador de los hermanos Wright de 1902.[1]
Referencias
- ↑ «Rotaciones de aeronaves». Glenn Research Center. 5 de mayo de 2015. Consultado el 13 de octubre de 2018.
| Control de autoridades |
|
|---|
 Datos: Q9288712
Datos: Q9288712